ZERO ROBOTICS
Referente: Prof.ssa Paola Grandillo




|
Zero Robotics | |||||||||||||||||||||||||||
| Zerorobotics Italy | Presentazione Regolamento 2018 (Politecnico di Torino) | |||||||||||||||||||||||||||
| ZR Tutorials Indice dei Tutorials ZR User API 2017 | ||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
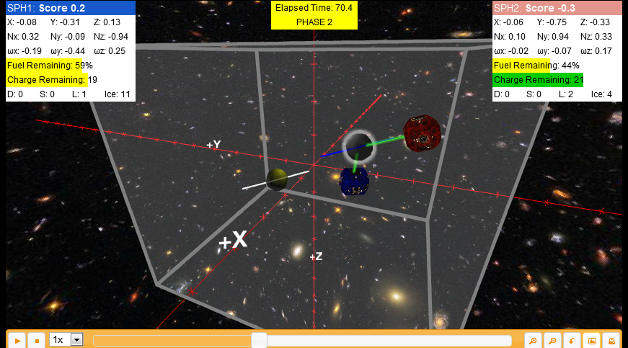
| SPHERES Control System Faces (Attitude) | ||||||||||||||||||||||||||||
|
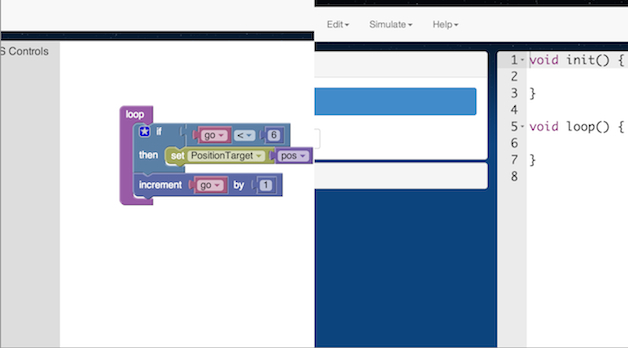
funzioni:
setPositionTarget (movimento)
setAttitudeTarget (puntamento faccia X- verso una direzione) |
||||||||||||||||||||||||||||
| Coordinate nello spazio Calcolo DISTANZA (con Scrath e C/C++) | ||||||||||||||||||||||||||||
| da Useful Math and Physics | ||||||||||||||||||||||||||||
| Fisica degli SPHERES CINEMATICA VETTORI-distanze | ||||||||||||||||||||||||||||
| Angoli di Eulero: video definizione Quaternioni: def. e operazioni H come Hamilton | ||||||||||||||||||||||||||||
| linguaggio C/C++ | ||||||||||||||||||||||||||||
| linguaggio C (pagg. 43-55) differenze tra C e C++: Input/Output | ||||||||||||||||||||||||||||
| linguaggio C++ | esempi: P-01 , P-02 , P-30 , P-20 (solo Esempi sugli ARRAY) | |||||||||||||||||||||||||||
Partecipazioni dell'Istituto alle Competizioni Zero Robotics
|
||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||